Autonomous Vacuumless Cleaning Robot
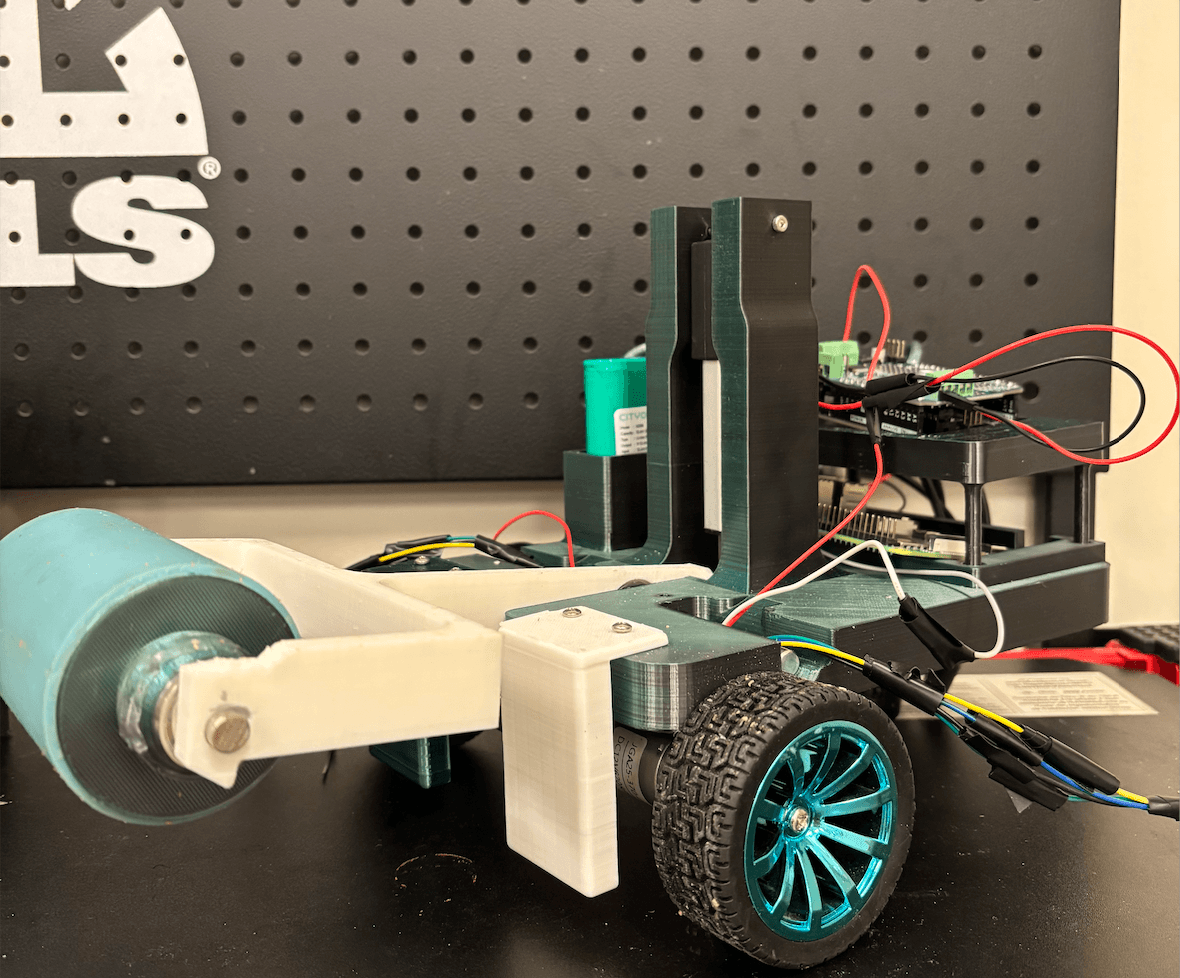
As part of our capstone engineering project, our team designed and built a floor-cleaning robot that eliminates the need for traditional vacuum suction. Instead, the system uses a rotating SBS sylicone roller to pick up dust, hair, and small particulates from hard-surface floors.
Development focused on the mechanical stack: chassis layout, roller engagement, debris collection, and integration with the drivetrain and power system. Iterative prototyping was used to tune roller pressure, belt tension, and overall mass distribution for stable motion during cleaning passes.
Structural components were designed in SOLIDWORKS and fabricated using FDM 3D printing and laser-cut acrylic. The drivetrain uses two geared DC motors with encoder feedback for differential steering, with onboard electronics handling motor control and sensor readouts.
Docking Station
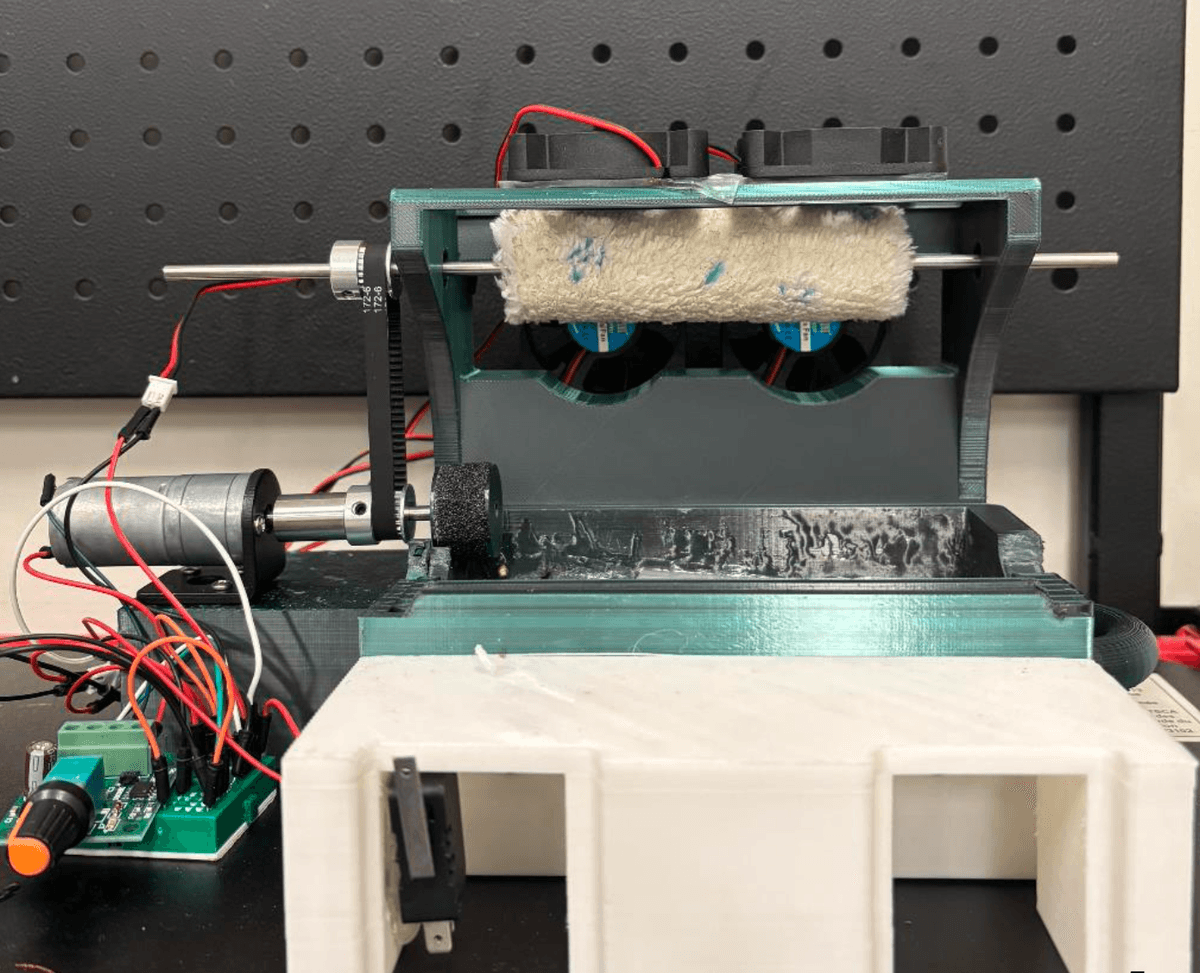
The docking station is designed to clean the roller of debris. It rotates the roller in water with sylicone brushes that help remove stuck particles. The water deactivates the tacky bonds and makes the roller completely slick. Once the particles are removed, the roller raises to a dry roller where this in conjunction with fans, dries the roller and returns it to a tacky state.
The docking station is triggered by a snap action switch that comes into contact with the robot's bumpers. It is all powered by a 12V battery and one DC motor with gears and shafts and a belt to rotate the necessary components.
Robot Demo
This clip shows a full cleaning cycle of the robot.