Soft Robot Control Box
The Harvard Biodesign Lab specializes in soft robots. Many of these are controlled pneumatically using air pressure to change the position and stiffness of these devices to assist joint movement. During my time working in this lab, to support internal lab efforts as well as service collaborators, I helped design and build control boxes for these soft robots.
This project focused on building a compact pneumatic control box for a wearable soft robotic device. The device was capable of controlling elbow, shoulder, and hand joints via soft pneumatic actuators. This project was a collaboration with BrainGate who was going to use this device for their BCI-based control system. So that impaired individuals could control assistive robots using just their neural actvitiy. This system was designed to be modular being able to support various actuator configurations.
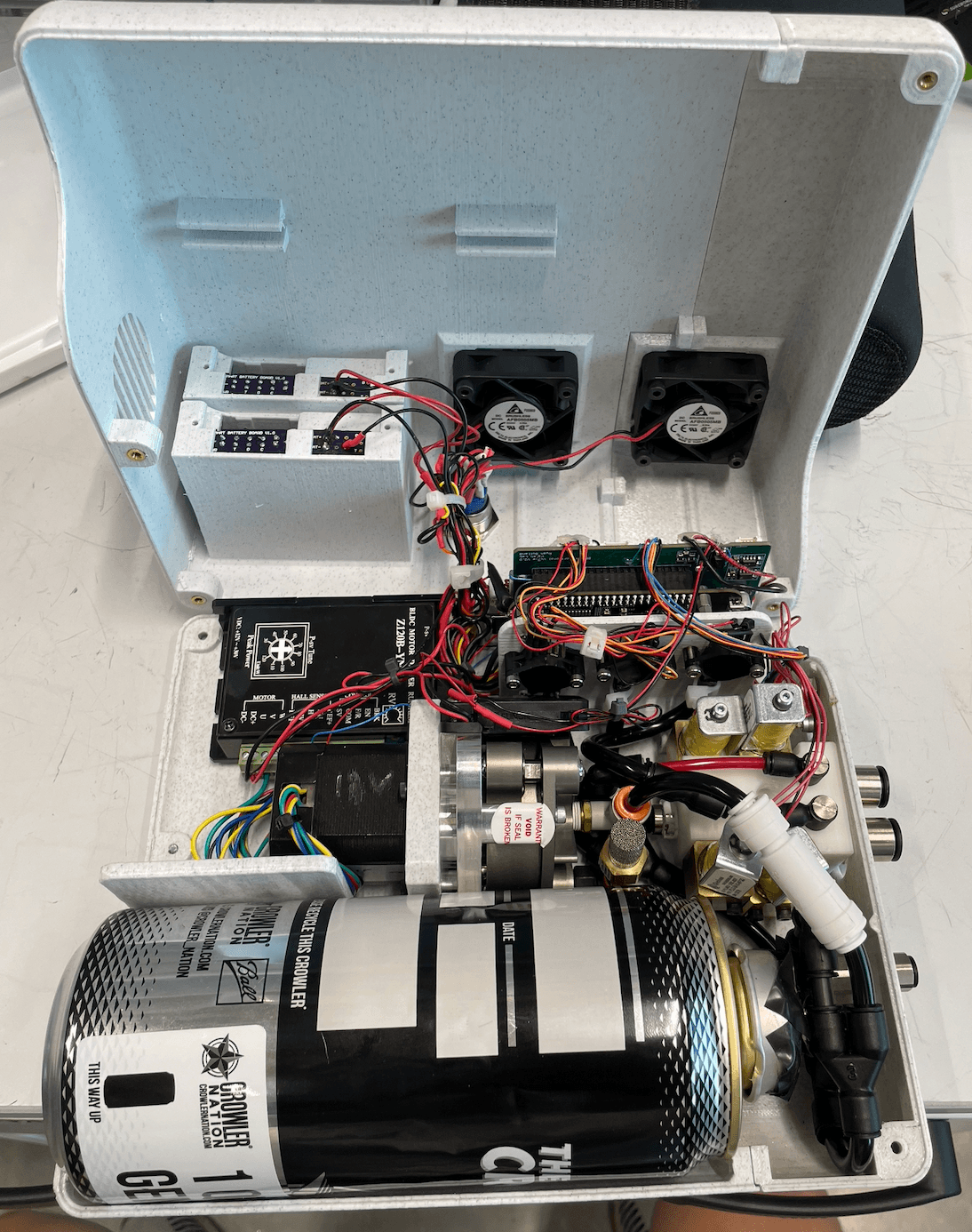
A pump was used to inflate a reservoir of air to a target pressure, and then the air was routed to the actuators via a series of valves in a central manifold. The system was powered by two rechargeable smart batteries. High level commands were given by a laptop connected via wifi and an arduino was used for low level control using analog pressure sensors.
Three of these control boxes were created, two to remain in the lab, and one to be sent to BrainGate.
Wearable Interface


The wearable devices were designed to distribute loads comfortably along the limbs while providing sufficient joint torque. The soft design allows for more comfort and compatibility with soft human tissue. These have been used in industrial as well as rehabilitation contexts.
Inflation Demo & Mechanical Characterization
This clip shows the device working to inflate an actuator. Normally these actuators will be stitched into a garment to provide joint torque. The device is able to quickly inflate the actuator to a given pressure and hold it with no further control effort.
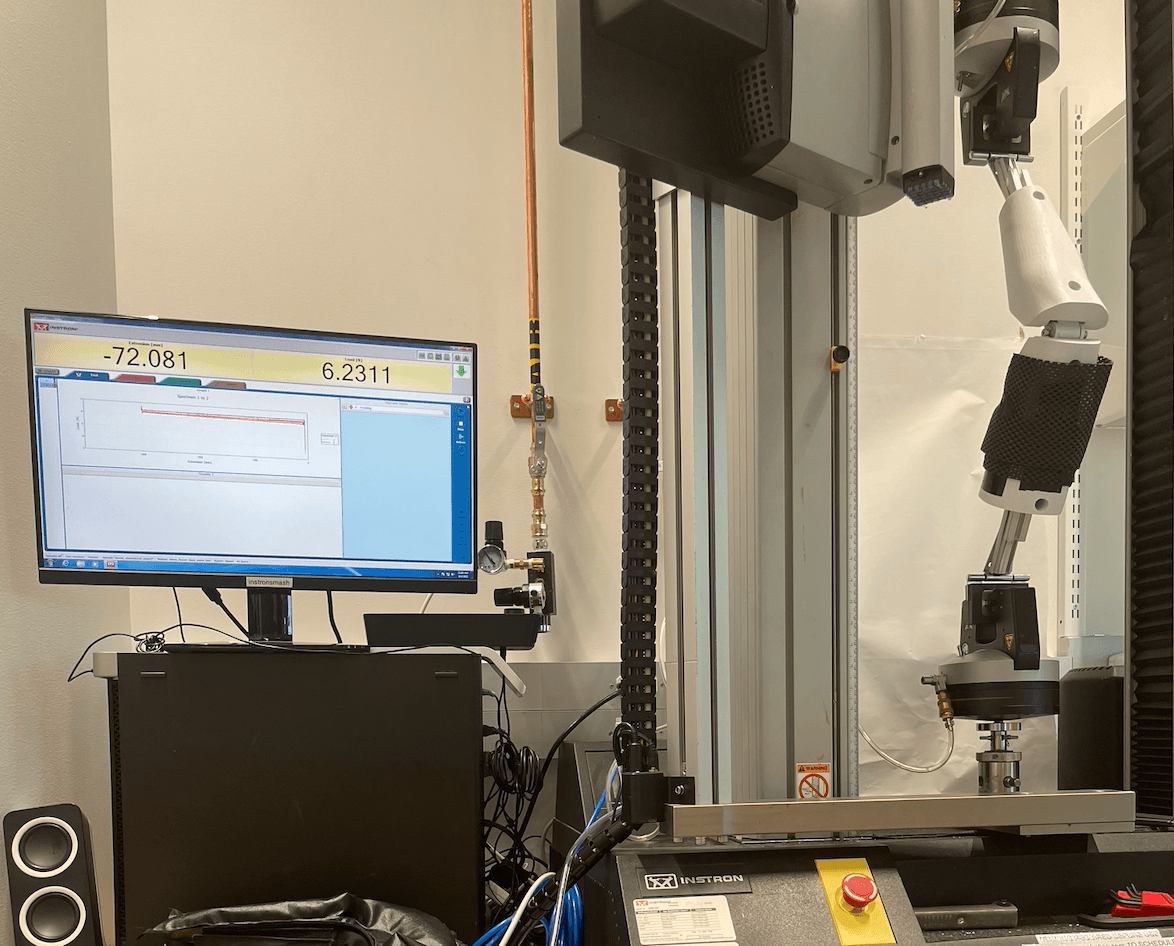
Mechanical characterization was done with an Instron machine to quantify the pressure-to-force relationship within the actuators as well as the hysteresis.